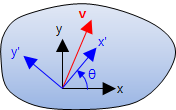
개요 (Introduction) 본 글에서는 좌표변환(coordinate transformation)을 다음 순서대로 다루게 된다: (i) 2-D 벡터 , (ii) 2-D 텐서, (iii) 3-D 벡터, (iv) 3-D 텐서, 그리고 최종적으로 4등급 텐서(4th rank tensor) 변환에 대해 알아 본다. 좌변변환의 주요 관점은, 특히 3-D에서, 변환행열(transformation matrix) 을 유도하는 것이다. 여기서는 소개만하고 변환행열 글에서 자세히 다루도록 한다. 본 글에서의 모든 좌표변환은 물체 자신은 고정된 채 좌표가 회전하는 것임을 하는 것이 매우 중요하다. 여기서 "물체"는 힘 또는 속도와 같은 벡터, 혹은 요소의 응력 이나 변형률 같은 텐서가 될 수도 있다. 물체의 회전은 회전행열 글에서 다룬다. 벡터의 2-D 좌표변환 (2-D Coordinate Transformation of Vectors) 아래와 같은 물체가 벡터를 가지고 있다고 하자. 하지만 좌표계(coordinate system)가 없이는 벡터를 기술할 방법이 없다. 그러므로 xy 좌표계가 그림과 같이 추가되면 이 벡터는 v =2 i +9 j 와 같이 기술할 수 있다. 이제 청색으로 나타낸 회전 좌표계 x'y'을 도입한다. 이 새로운 좌표계는 원좌표계로부터 반시계 방향으로 θ 만큼 회전된 것이다. 이 벡터 자신은 변한게 전혀 없다는 점에 주의한다. 하지만 새로운 좌표계에서는 다른 값으로 기술된다. 이 경우, 벡터는 새로운 y'축보다 x'축에 좀 더 평행하게 근접하므로 i ' 성분은 j ' 성분보다 클 것이다. 이 2-D 벡터 변환 방정식은 i 성분을 \(v_x\), j 성분을 \(v_y\)로 두면 \[\begin{split}&v'_x=\ \ \,v_x\cos\theta+v_y\sin\theta\\&v'_y=-v_x\sin\theta+v_y\cos\theta\end{spli...