평형 (Equilibrium)

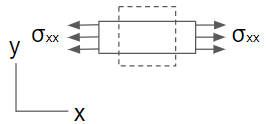
2-D 평형 (2-D Equilibrium) 아래와 같은 2차원 미소요소에 작용하는 모든 힘의 합은 ma와 같아야 한다. 요소에 작용하는 힘들은 아래와 같이 방향별 응력 성분들로 구성된다. \[\begin{split}&{\rm F}_{xx}+d{\rm F}_{xx}=\sigma_{xx}dy+\frac{\partial\sigma_{xx}}{\partial x}dxdy,\ &{\rm F}_{yy}+d{\rm F}_{yy}=\sigma_{yy}dx+\frac{\partial\sigma_{yy}}{\partial y}dxdy\\&{\rm F}_{xy}+d{\rm F}_{xy}=\tau_{xy}dy+\frac{\partial\tau_{xy}}{\partial x}dxdy,&{\rm F}_{yx}+d{\rm F}_{yx}=\tau_{yx}dx+\frac{\partial\tau_{yx}}{\partial y}dxdy\end{split}\] 또한 여기에 체적력(body force)이 더해진다. 이들은 중력, 자기력 등을 포함하며 ρfdxdy 로 나타낸다. 여기서 ρ는 밀도, f는 단위질량 당 힘이다. 먼저 x방향 힘의 평형을 생각하면 \(\sum {\rm F}_x=ma_x\) 이므로 \[\begin{align}&-{\rm F}_{xx}-{\rm F}_{yx}+{\rm F}_{xx}+d{\rm F}_{xx}+{\rm F}_{yx}+d{\rm F}_{yx}+\rho f_xdxdy=ma_x\\&\frac{\partial\sigma_{xx}}{\partial x}dxdy+\frac{\partial\tau_{yx}}{\partial y}dxdy+\rho f_xdxdy=\rho dxdya_x\end{align}\] dxdy로 양변을 나누면 \[\frac{\partial\sigma_{xx}}{\partial x}+\frac{\partial\tau_{xy}}{\partial y}+\rho f_x=\rho a_x\] y방향에 대해서도 같은...